 Bunny-VisionPro
Bunny-VisionPro
Real-Time Bimanual Dexterous Teleoperation for Imitation Learning
Bunny-VisionPro is a real-time bimanual teleoperation system that prioritizes safety and minimal delay. It also features human haptic feedback to enhance immersion. High-quality demonstration is collected to improve imitation learning.
Abstract
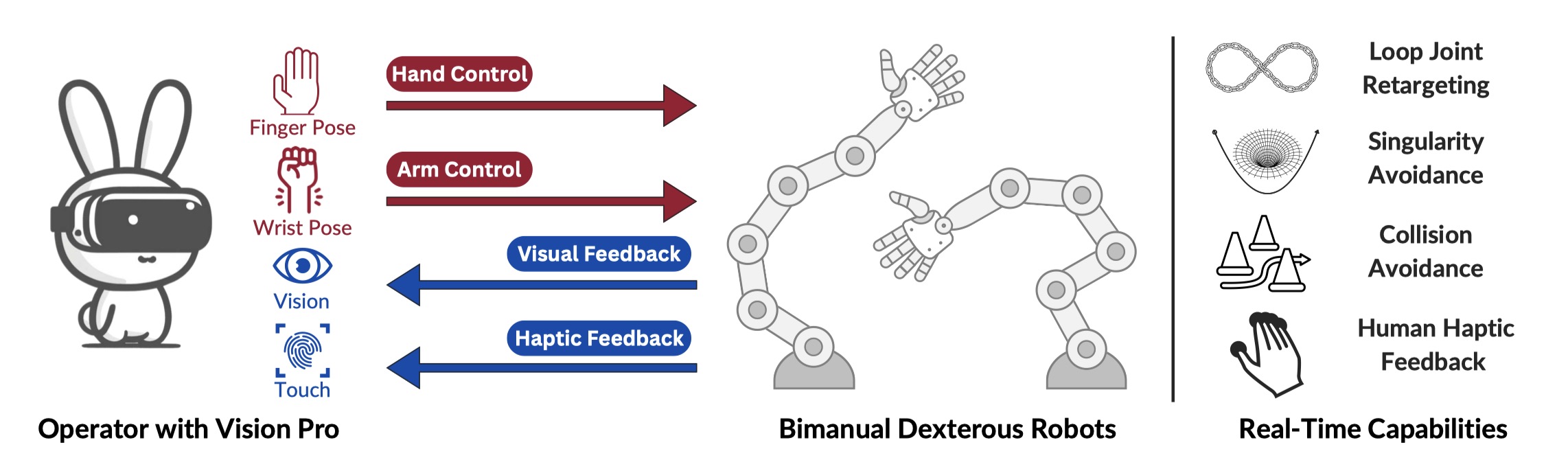
Teleoperation is a crucial tool for collecting human demonstrations, but controlling robots with bimanual dexterous hands remains a challenge. We introduce Bunny-VisionPro, a real-time bimanual dexterous teleoperation system that leverages a VR headset. Unlike previous vision-based teleoperation systems, we design novel low-cost devices to provide haptic feedback to the operator, enhancing immersion. Our system prioritizes safety by incorporating collision and singularity avoidance while maintaining real-time performance through innovative designs. Bunny-VisionPro outperforms prior systems on a standard task suite, achieving higher success rates and reduced task completion times. Moreover, the high-quality teleoperation demonstrations improve downstream imitation learning performance, leading to better generalizability. Notably, Bunny-VisionPro enables imitation learning with challenging multi-stage, long-horizon dexterous manipulation tasks, which have rarely been addressed in previous work. Our system's ability to handle bimanual manipulations while prioritizing safety and real-time performance makes it a powerful tool for advancing dexterous manipulation and imitation learning.
Skincare Teleoperation
Hand poses captured by Apple Vision Pro are converted into robot motion control commands for real-time teleoperation. We prioritize safety through singularity checks and collision avoidance, enabling the robot to perform human skincare tasks safely in teleoperation mode.
Teleoperation System
Human Haptic Feedback
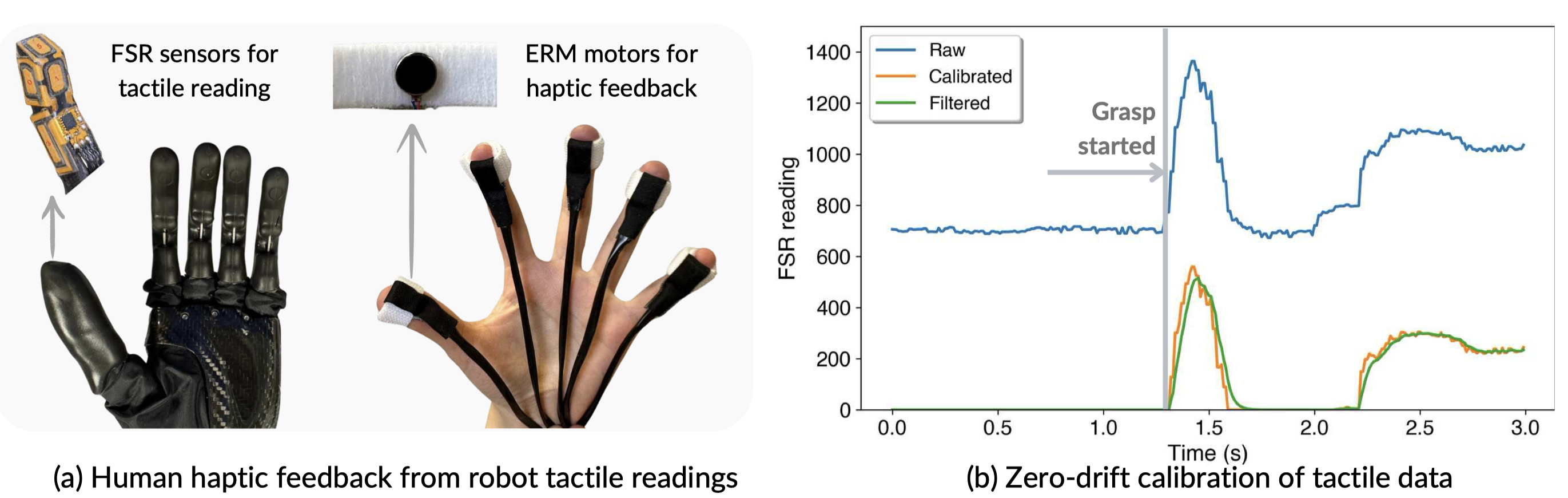
Effective human manipulation integrates visual and tactile feedback, but many vision-based teleoperation systems overlook haptic feedback. We developed a cost-effective haptic feedback system using ERM actuators to address this. It processes tactile signals from robot hands and drives vibration motors to simulate sensations, allowing operators to perceive and respond to the environment more intuitively, enhancing manipulation performance.
Haptic Feedback Demo
Haptics User Study
Imitation Learning
We evaluate the quality of demonstrations collected by our system by training popular imitation learning algorithms — ACT, Diffusion Policy, and DP3 — and testing their generalization performance in term of spatial generalization and unseen scenarios. Additionally, we train on challenging long-horizon tasks to showcase our system's effectiveness in collecting high-quality demonstrations.
Long-horizon Tasks
Generalization Results
Cleaning pan
Spatial Generalization
Unseen Object
Uncovering & Pouring
Spatial Generalization
Unseen Object
Grasping toy
Spatial Generalization
Unseen Object
Safety and Real-time Performance
Arm Motion Control: Bunny-VisionPro vs AnyTeleop+
Collision Avoidance
Comparing Wearable Devices for Hand Pose Tracking and Robot Retargeting
More Teleoperation Tasks
Haptic Feedback Tasks
Opening Cabinet
Cleaning Whiteboard
Kitchen Tasks
Motion-constrained Tasks
Dynamic Tasks
BibTex
@article{bunny-visionpro,
title = {Bunny-VisionPro: Real-Time Bimanual Dexterous Teleoperation for Imitation Learning},
author = {Runyu Ding, Yuzhe Qin, Jiyue Zhu, Chengzhe Jia, Shiqi Yang, Ruihan Yang, Xiaojuan Qi, and Xiaolong Wang},
year = {2024}
}
If you have any questions, please feel free to contact Runyu Ding.